
Защита растений с использованием видеокамер? Такая техника уже известна, но насколько она практична? HORSCH LEEB уже продолжительное время тестирует ее возможности. Тео Лееб на страницах нашего издания рассуждает о ее вызовах и шансах.
Система камер с распознаванием растений – техника будущего?

terraHORSCH: Какие технические возможности предлагаются сегодня для распознавания машиной растений?
Теодор Лееб: На Agritechnica 2019 мы видели, насколько смело молодые предприятия из Start-up-сцены представляли свои решения в сегменте Spot Spraying. Это вызвало у клиентов, производителей и политиков определенную позицию ожидания появления в скором времени уже серийных решений для практики. Наше предприятие много предприняло в последние годы, чтобы попытаться отделить зерна от плевел в этом сегменте и понять для себя, где мы в этом направлении находимся. Spot Spraying с оптическими датчиками или видеокамерами уже давно не является чем-то революционно новым. Такую технику уже ок. 20 лет успешно используют в засушливых регионах с малым количеством осадков, в частности Австралии, России или Казахстане – однако только по принципу «Green on Brown» («зеленое на коричневом»), т.е. речь идет об обработках не по вегетации. Последние ведутся по принципу «Green in Green» («зеленое в зеленом»), что предполагает гораздо больший диапазон избирательности.
terraHORSCH: Что конкретно значит «Green on Brown» и «Green in Green»?
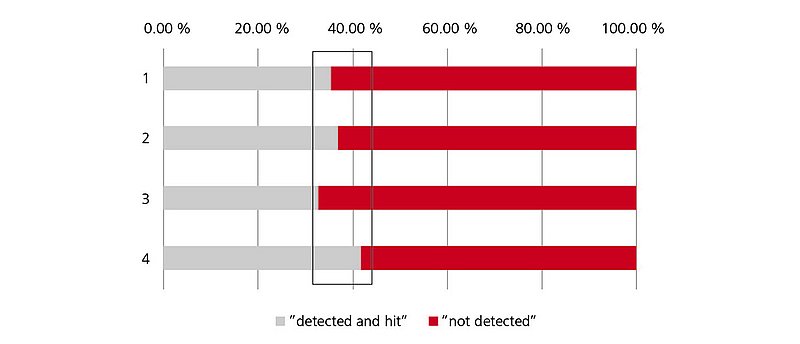
Теодор Лееб: В этой терминологии коричневый и зеленый цвета символизируют почву или растения соответственно. Зеленый цвет подразумевает как культуру, так и сорные растения. Первый принцип («Green on Brown») подразумевает довсходовые гербицидные обработки глифосатами. Эта технология уже достаточно давно и широко применяется в системах No-Till. Принцип «Green in Green» подразумевает избирательность, т.е. определение типа растения: культура это или сорняк. Дальнейшее развитие этой темы идет в направлении идентификации отдельных групп сорных растений. Забегая вперед, скажу, что мы уже два года очень активно тестируем в этом сегменте. В частности, по принципу «Green in Green» мы сделали опыт по контролю осота в посевах пшеницы. Осот, как правило, редко встречается в поле в виде одиночных растений, а чаще присутствует очагами (т.н. «гнезда). Нам был важен, во-первых, сам факт обнаружения системой осота и, во-вторых, эффективность его поражения (%). Наша камера-техника в опыте в целом неплохо идентифицировала осот, однако не все растения. Эффективность поражения составляла 40-60%. Встает резонный вопрос: а достаточно ли этого для эффективного контроля? Я считаю, что пока рано говорить о серийном применении таких решений. Второй аспект, который волнует фермеров-практиков – это резистентность некоторых особо злостных сорняков к гербицидам. Как в этом случае бороться с ними?
terraHORSCH: Вы сказали, что не все растения осота были обнаружены… Это было следствием неспособности системы, или скорость ее реагирования была недостаточной?
Теодор Лееб: В нашем опыте мы дифференцировали на «обнаружил, но не попал» и «не обнаружил». Как выяснилось, здесь важную роль играет калибровка системы. На штанге захватом 36 м установлены 12 видеокамер, которые направлены по ходу движения агрегата. В поле зрения каждой камеры находятся «приписанные» ей форсунки.
Позиция каждой из камер очень важна,потому что отклонение даже в сотую часть градуса сказывается в конечном итоге на скорости открытия конкретной форсунки. Но это только часть проблемы. Система, действительно, имеет трудности с идентификацией осота как сорняка. Т.е. имеет значение погода (солнечная или пасмурная), движение машины по отношению к положению солнца и т.д. К тому же осот, как и другие растения реагирует на интенсивность солнечного излучения (феномен «завядания» в жаркую сухую погоду). Все это заметно снижает качество обнаружения.
terraHORSCH: Как можно было бы его повысить?
Теодор Лееб: Нужно понимать, что здесь задействован искусственный интеллект (ИИ). Чтобы его «обучить» нужно большее количество данных: фото осота в разную погоду, под разными углами падения солнечного света, в разных стадиях развития и т.д. В итоге это тысячи фотографий, которые нужно вручную выбрать и «подсунуть» машине. Понятно, что для этого нужно много времени и кому-то еще только предстоит проделать эту работу.
В опыте по принципу «Green on Green» система хуже опознавала осот, если цвет, форма или интенсивность линий растений сильно варьировали. К тому же, опознавались только растения, превышающие общий массив. 
В опыте по принципу «Green on Green» система хуже опознавала осот, если цвет, форма или интенсивность линий растений сильно варьировали. К тому же, опознавались только растения, превышающие общий массив.
terraHORSCH: Осот, по сравнению с некоторыми другими видами сорняков, еще сравнительно легко отличить от культуры…
Теодор Лееб: Это верно. Но только для человеческого глаза. Мы, действительно, легко отличаем двудольное растение от однодольного (злака, например). Но попробуйте отличить всходы лисохвоста и пшеницы!? Для человека это почти запредельно. Для машины, напротив, нет - при условии, что мы сможем снабдить ее необходимым количеством данных.
Еще одна техническая проблема – площадь пятна обработки. Теоретически здесь скрывается большой потенциал для экономии СЗР, если мы, скажем, под площадью одного отдельного пятна будем понимать круг диаметром 5 см.
Однако на практике мы используем полевой штанговый опрыскиватель с расстановкой форсунок через 25, а то и 50 см, следовательно, минимальный диаметр пятна контакта составит 35 или 60 см соответственно. К тому же на скорости это будет не круг, а овал – и чем выше скорость, тем сильнее он будет вытянут в длину. Другой предел обусловлен физикой, а если точнее – оптикой.
Возьмем, например, обработки свеклы: здесь очень важно подавить развитие сорняков на самых ранних стадиях их развития, когда их рост составляет 1 см и меньше. Теоретически возможно распознать их видеосистемой при малой скорости движения и максимально широкому обзору камер. Однако рабочая скорость полевого опрыскивателя на практике составляет 10 км/ч и больше. Установка угла обзора камер должна быть направлена вперед, чтобы увеличить время реагирования системы.
Если же перед сорным растением будет лежать ком земли, либо находиться другое растение, камера не сможет его распознать – поэтому 100% квота попадания уже по определению невозможна. Хорошо, тогда какой диапазон приемлем? 90%? 80%? Будет это зависеть от видового состава сорняков? Ответа на эти вопросы мы еще пока не знаем.

Так как осот растет не по всей площади поля, а гнездами, то для изучения борьбы с ним напрашиваются опыты с точечным опрыскиванием (Spot Spraying). В тесте изучалась как квота поражения растений сорняка, так и самого факта его обнаружения. 
Так как осот растет не по всей площади поля, а гнездами, то для изучения борьбы с ним напрашиваются опыты с точечным опрыскиванием (Spot Spraying). В тесте изучалась как квота поражения растений сорняка, так и самого факта его обнаружения.
terraHORSCH: Получается, развитие этой темы лимитировано сегодня количеством данных и физикой…
Теодор Лееб: Да, но есть еще и третий аспект. В технологиях возделывания многих культур перед посевом используются почвенные гербициды. Это помогает в некоторой степени защитить юные всходы культуры. Следующую волну сорняков подавляют уже гербицидной обработкой по листу. Если отказаться от почвенных гербицидов, нужно будет выждать определенное время, чтобы сорняки выросли и камера могла их распознавать.Предположим, мы это сделали и работаем гербицидом по системе Spot Spraying по листу. Проблема состоит в том, что растения культуры тоже подвергаются стрессу. По крайней мере, если сорные и культурные растения находятся в непосредственной близости друг от друга. К тому же, сорняки ведь всходят не одновременно… В этой связи возникает резонный вопрос: как часто нужно будет проводить обработки, чтобы массив оставался чистым? Мы еще не пробовали отказаться от почвенных гербицидов. На мой взгляд, на свекле это было бы нерационально. Более действенным решением была бы комбинация гербицидной обработки почвы и Spot-Spraying обработки по листу. Также допустимой я считаю определенную долю толерантности по отношению к сорнякам, которые не представляют экзистенциальной опасности для культуры. При сбалансированном севообороте их контроль решался бы за счет плодосмены. Я убежден, что здесь скрывается большой экономический потенциал. Но технику для точечного опрыскивания необходимо еще доработать так, чтобы она могла распознавать не только сам сорняк, но и определять его тип.
terraHORSCH: Пока что мы говорили о гербицидных обработках… Где еще можно было бы применять Spot-Spraying?
Теодор Лееб: Spot-Spraying имеет, на мой взгляд, потенциал применения при фунгицидных обработках зерновых или при работе с гормонами роста. Здесь речь идет, по сути, не о пунктуальной точности, а о работе пульсирующими форсунками по системе PrecisionSpray с вариабельным расходом секциями штанги (по 3 м шириной). Камеры предлагают дополнительную возможность обнаружения очагов болезни в массиве – с тем, чтобы соответствующая форсунка пунктуально увеличила норму расхода. Но это уже будет по сути не предотвращение заболевания, а борьба с его последствиями. Будет ли это эффективно? Сомневаюсь…
terraHORSCH: Как работает принцип «GreenonBrown»?
Теодор Лееб: Здесь мы вместе с одним французским производителем заложили несколько опытов. Сам процесс построен на цветовой идентификации поверхности, т.е. камера анализирует цифровое отображение картины и определяет, какие это пиксели: зеленые или коричневые. Зеленые участки обрабатываются, коричневые - нет. Эта система достаточно простая и надежная, хотя в то же время мало используется в Европе. Причинами тому служат интенсивная почвообработка и достаточное увлажнение.
terraHORSCH: Вы могли бы объяснить это подробнее?
Теодор Лееб: В регионах с высокой урожайностью, как правило, после уборки проводится стерневая обработка – для перемешивания пожнивных остатков, провокации всходов падалицы, закрытия влаги и пр. Через некоторое время, после появления всходов падалицы, проводится повторная обработка. Т.е. большую часть времени поле находится под покровом растительности с последовательно следующими механическими обработками. Да, очаги засоренности могут присутствовать тоже, но логично обрабатывать все же весь массив, а не локально. В засушливых регионах, где доминирует прямой посев, ситуация выглядит иначе. Здесь стерня после уборки культуры остается нетронутой. Ввиду недостатка или отсутствия влаги отсутствуют массовые всходы падалицы и сорняков. А те редкие очаги засоренности, которые появляются, вполне можно обнаружить камерами и соответственно обработать. Такой подход по сравнению со сплошной обработкой существенно экономит время, деньги и ресурсы. Кроме упомянутых систем «Green on Brown» и «Green in Green» существует еще различие между онлайн и офлайн процессами. Все, о чем мы говорили ранее, относится к онлайн-процессам, т.к. они основаны на решениях ИИ. Офлайн-процессы, напротив, требуют вмешательства человека. В данном случае проводится предварительное сканирование площади поля, например, с использованием БЛА с видеокамерами. Полученную информацию в виде электронной аппликационной карты используют затем в качестве рабочего задания для машины с СЗР. По сути, это мало отличается от дифвнесения удобрений с использованием карт-предписаний. В этом сегменте мы тоже в сотрудничестве с одним стартапом закладываем различные опыты, чтобы лучше изучить возможности системы. Например, для того, чтобы понять длительность временных промежутков между отдельными этапами процесса. Ведь каков смысл использовать данные 2-недельной давности как основу для предписаний? Где актуальность? Другой барьер имеет чисто физическую природу. Раздельное проведение отдельных этапов процесса обработки требует увеличения площади пятна контакта, т.к. границы GPS-толерантности беспилотника и опрыскивателя накладываются друг на друга и суммируются – соответственно, увеличивается расход ресурсов и снижается экономический эффект. Дополнительным вызовом являются большие массивы данных – это гигабайты/га, которые нужно отправить на сервер для обработки. Современная скорость интернета не всегда позволяет это вовремя сделать. С другой стороны, уже готовые карты-предписания нужно передать обратно фермеру и машине. В зависимости от полигона (количества очагов) современные ISOBUS-терминалы могут единовременно использовать карты-предписания для полей площадью не более 5 га! Это значит: технически или технологически офлайн-процесс вполне реализуемый. Чтобы сделать его практически применимым потребуется еще некоторое время, чтобы оптимизировать решения и способы приема-передачи, обработки и хранения больших массивов данных. Возможно для этого потребуется разработать параллельную к ISOBUS шину интерфейса.
terraHORSCH: Какое резюме следует из всего вышесказанного?
Теодор Лееб: По моему мнению, Spot Spraying – это следующий логический шаг, который позволит удовлетворять все возрастающим требования программ Green Deal, защиты климата и окружающей среды. Мы последовательно уходим от сплошных обработок через полосное опрыскивание к адресному, точечному применению СЗР. Целью являются предельно минимальные обработки: в нужное время, в нужном месте, в нужном количестве. Техника, обладающая системой видеокамер для определения такой потребности, является здесь наиболее приемлемым инструментом. Мы работаем дальше над оптимизацией таких систем и закладываем новые опыты. Наша задача при этом – найти простые, эффективные и надежные технические и технологические решения, имеющие для практиков наибольший потенциал. В таком ракурсе использование Spot Spraying может стать следующим шагом на пути оптимизации систем защиты растений. Но я вижу при этом и лимитирующие факторы, т.к. на поле никогда не будет нормированных и постоянных условий. Мое заключение: природа останется природой, где всегда будет масса переменных, трудно предсказуемых и калькулируемых факторов. И она вряд ли позволит управлять собой, как бы мы ни пытались зашнуровать ее в удобный для нас технический или цифровой корсет.