
Prepoznavanje pojedinačnih biljaka – sistem kamera za budućnost?

Zaštita bilja zasnovana na kamerama – ova tehnologija već postoji, ali kakva je situacija kada je u pitanju njena primjena u praksi? HORSCH LEEB već neko vrijeme vrši testiranja na ovu temu. Theo Leeb nam priča o izazovima i prilikama.
terraHORSCH: Kakvo je stanje tehnologije u pogledu prepoznavanja pojedinačnih biljaka?
Theodor Leeb: Na sajmu Agritechnica 2019. se predstavilo nekoliko startup poduzeća sa svojim sistemom kamera za ciljano prskanje korova („Spot Spraying“). To je kod kupaca, proizvođača i političara stvorilo izvjesna očekivanja.
Mi u firmi smo se proteklih godina pokušali baviti ovom temom i vidimo gdje se točno nalazimo. Spot Spraying sa optičkim senzorima ili kamerama zapravo nije ništa novo. Ovaj postupak se već oko 20 godina koristi u područjima sa malo padalina, gdje se vrši direktna sjetva, a to su Australija, Rusija ili Kazahstan – naime u sektoru „Green on Brown“. Postoji i princip „Green on Green“. Dakle, tehnologija već postoji. Pitanje je koji sistem je gdje primjenljiv.
terraHORSCH: Šta znači „Green on Brown“ i „Green on Green“?
Theodor Leeb: Postoje dva principa: „Green on Brown“ i „Green on Green“. Pritom se „brown“ odn. „smeđe“ odnosi na zemljište, a „green“ odn. „zeleno“ na biljke, bilo usjev ili korov. Tema „Green on Brown“, dakle „zeleno na smeđem“, postoji već duže vrijeme. Tu neki proizvođači nude između ostalog sisteme za aplikaciju glifosata prije sjetve. Ova metoda se uglavnom koristi u područjima gdje se primjenjuje direktna sjetva. Kod metode „Green on Green“, dakle „zeleno na zeleno“, radi se razlika između usjeva i korova. Djelomično dobivate informaciju koji korov tu raste. Na pitanje koliko smo daleko stigli, mogu reći da smo ove sezone, ali i prošle godine obavili nekoliko testova.
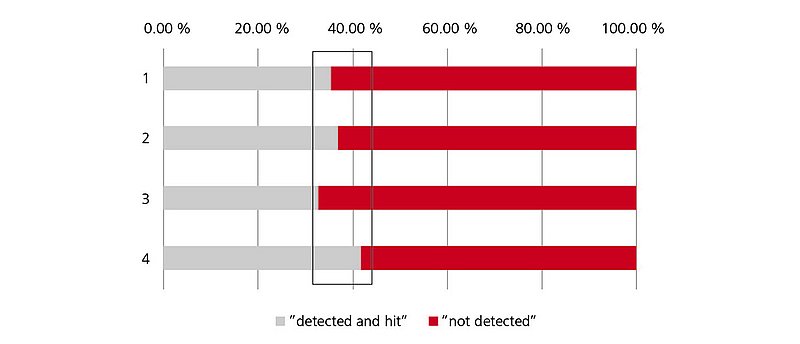
Kod metode „Green on Green“ smo npr. probali da prskamo čičak u usjevu pšenice. Čičak po pravilu raste u grupama, a ne po cijeloj parceli. To je tipičan slučaj za Spot Spraying. U tom testiranju smo željeli da saznamo kako točno sistem prepoznaje čičak i koliko će biti uspješan u tome. U suštini, moglo bi se reći da sistem funkcionira. Sistem je prepoznao čičak, ali samo djelomično. Uspješnost prepoznavanja je 40-60%. Tu se sad postavlja pitanje da li je to dovoljno. Po meni smo još dosta daleko od uspješne primjene u praksi. A kao poljoprivrednik se morate zapitati što je sa preostalim korovom – da li se može tolerirati ili ne? To naravno zavisi od vrste korova, ali se mora razjasniti.
terraHORSCH: Da li čičak nije uopće registriran ili sistem nije reagirao dovoljno brzo i tretirao čičak?
Theodor Leeb: U ovom ogledu smo radili razliku između „prepoznavanja, ali bez prskanja“ i „potpunog neprepoznavanja“, gdje, logično, uopće nije bilo prskanja. Tu je i pitanje kalibracije sistema. Kod krila od 36 metara, na razmaku od 3 metra imate ukupno 12 kamera, uperenih naprijed pod kutom. I svaka kamera nadgleda odgovarajući broj dizni. Neke kamere se moraju podesiti na odgovarajući način, kako bi se odgovarajuća dizna otvorila u pravom trenutku.
Pravi problem predstavlja to što sistem nije prepoznao čičak. Najveći izazov predstavlja različito osvjetljenje. Odnosno, razliku čini činjenica da li je oblačno ili sunčano, da li ste okrenuti k suncu ili vam ono bije u leđa. A vremenski uvjeti opet utječu na sam čičak. Na primer, na jakoj sunčevoj svjetlosti listovi čička se blago savijaju, što rezultira mnogo nižom stopom prepoznavanja. Tako da smo shvatili da još uvijek postoji potreba za usavršavanjem.
terraHORSCH: Što bi se moglo poboljšati na sistemu „Green on Green“, da bi funkcionirao?
Theodor Leeb: Morate biti svjesni da iza njega stoji umjetna inteligencija (UI).Potrebno je strašno puno podataka da bi sistem prepoznao čičak. Potrebne su slike i podaci o čičku u svim formama, pri svakoj vrsti osvjetljenja, stadiju rasta, za svaku vrstu čička itd. To su tisuće slika, koja se moraju „ručno“ analizirati i „označavati“. Svaki piksel mora doći na pravo mjesto. To je izuzetno veliki posao, a ujedno i prelomna točka. Što je više slika, to će sistem biti precizniji i pouzdaniji.
U ogledu „Green on Green“ sistem je bio lošiji u raspoznavanju čička čim variraju boja, oblik ili intenzitet svijetla. Osim toga, prepoznavao je samo čičak koji je bio iznad kultiviranih biljaka. 
U ogledu „Green on Green“ sistem je bio lošiji u raspoznavanju čička čim variraju boja, oblik ili intenzitet svijetla. Osim toga, prepoznavao je samo čičak koji je bio iznad kultiviranih biljaka.
TerraHORSCH: A pritom je čičak lako prepoznatljiv u usporedbi sa drugim biljkama.
Theodor Leeb: To je točno. Lako je prepoznatljiv ljudskom oku i čovjek ga lako razlikuje. Razlika između monokotiledonih i dikotiledonih biljaka je jasna. Ali kada treba razlikovati mačiji rep od pšenice, to već nije lako. Tu dolazimo do granice mogućeg.
Postoje i druga tehnička ograničenja. Važna stvar je najmanja moguća površina koja se može prskati. U teoriji, najveći potencijal za uštedu bi bio u mogućnosti da se prska svaki mali korov na površini od npr. 5x5 cm. Pošto mi radimo sa prskalicama kod kojih su dizne postavljene na razmaku od 50 cm ili 25 cm, dobivamo minimalnu površinu za prskanje od oko 60 cm odnosno 35 cm, zavisno od rasporeda dizni. Pošto se dizne ne mogu aktivirati beskonačno brzo, točke prskanja su dugačke oko 50 cm u smjeru kretanja. Ako je razmak između korova manje od 50 cm, sistem se neće isključiti. Dakle, za potencijal uštede je od bitnog značaja veličina mlaza i zastupljenost korova u usjevu. Fizika odnosno optika su još dva ograničavajuća faktora. Uzmimo za primjer repu. Ovdje je vrlo važno prepoznati korov u ranoj fazi, odnosno kada je velik 1 cm ili čak i manji. U teoriji je moguće otkriti ovu sićušnu biljku pomoću sistema, ako vozite vrlo sporo i zaista je pogledate sa svih strana. Međutim, u praksi su uobičajene radne brzine od 10 km/h i više. Kako bi imale dovoljno vremena reagirati, kamere su usmjerene u naprijed pod kosim kutom. Ali, ako se ispred korova nalazi velika gruda zemlje ili ako druga velika biljka zaklanja korov, kamera ga neće detektirati. Dakle, ne možete postići uspješnost detekcije od 100%. Sada je pitanje koliki postotak je prihvatljiv. Da li je 90% dovoljno? Trenutno to jednostavno ne znamo.

Pošto čičak ne raste na čitavoj površini, već u grupama, postoje ogledi sa Spot Sprayingom. Testovi su pokazali koja je stopa prepoznavanja i da li sistem uopće prepoznaje čičak. 
Pošto čičak ne raste na čitavoj površini, već u grupama, postoje ogledi sa Spot Sprayingom. Testovi su pokazali koja je stopa prepoznavanja i da li sistem uopće prepoznaje čičak.
terraHORSCH: Dakle trenutno ovu temu ograničavaju podaci i fizika.
Theodor Leeb: Da, ali tu se javlja i treća stvar. Kod mnogih okopavina je dobra stručna praksa da se nakon sjetve primjeni zemljišni herbicid, što garantira osnovnu zaštitu na određeno vrijeme. Korov koji nikne poslije dva do tri tjedna se zatim tretira sredstvima za folijarnu primjenu. Ako odlučimo da ne koristimo zemljišni herbicid, logično je da moramo pričekati da korov poraste kako bi ga kamera otkrila. Pretpostavimo da korov koji je izrastao prskamo metodom Spot Spraying. Tu je problem što folijarni herbicidi ometaju razvoj usjeva. Prskanje se ne može izbjeći ako je korov blizu repe. Osim toga, vremenom se stalno pojavljuju novi korovi. Dakle, pitanje je koliko često moramo prskati, da bi usjev bio čist? Još nismo probali izostaviti zemljišni herbicid. Po mom mišljenju nema ni smisla to raditi. Smisla ima kombiniranje, dakle prva mjera je površinski zemljišni herbicid, a zatim slijede Spot Spraying sistemi zasnovani na kamerama. Mislim da je zanimljiva ideja prihvaćanja određenog stupnja štete odnosno toleriranja određenih korova, koje kamera klasificira, zato što sa pametno isplaniranim plodoredom ne predstavljaju problem u narednoj sezoni ili se onda lako tretiraju. Mislim da tu postoji veliki potencijal za uštedu. Međutim, ovdje je potrebno još dosta razvoja, jer je pored običnog prepoznavanja potrebna i klasifikacija korova.
terraHORSCH: Sada smo čuli primjer herbicida. Da li postoje druga područja u kojima to možete zamisliti?
Theodor Leeb: U slučaju bolesti biljaka, na primjer, mogu se na žitarice primjeniti fungicidi specifični za područje ili regulatori rasta. Ali za to nije potreban fino podijeljen sistem za prskanje, pošto je ovdje riječ o većim površinama. Za tu primjenu imamo naš PrecisionSpray sa varijabilnim doziranjem na svakih 3 m krila. Ali postoje metode prepoznavanja bolesti pomoću kamera. Pitanje je da li je za to već kasno. Po meni je svrsishodniji pristup koji koristi biomasu i modele vremenskih uvjeta.
terraHORSCH: Kako funkcionira „Green in Brown“?
Theodor Leeb: Što se ovoga tiče, proveli smo zajednička istraživanja sa jednim proizvođačem iz Francuske. Postupak se bazira na razlikovanju boja. Dakle, imamo jednu sliku i analiziramo koji pikseli su zeleni, a koji smeđi, da li je biljka ili zemlja. Zatim se prska zelena površina. To je dobro funkcioniralo, doduše ovaj sistem nije toliko značajan u Srednjoj Europi, pošto se više provodi obrada zemljišta i uvjeti rada su vlažni.
terraHORSCH: Možete li to malo detaljnije objasniti?
Theodor Leeb: Na mjestima sa visokim prinosima poslije žetve se obično provodi obrada strnjišta, kako bi se umiješali žetveni ostaci. Kroz nekoliko dana ili tjedana nići će samonikle žitarice ili korov. To jest, parcela će biti manje-više zelena. U tom slučaju ciljani tretman biljaka nema smisla, jer su biljke međusobno preblizu. Morali biste tretirati čitavu površinu, a ne samo konkretna mjesta. Stvari su drugačije u sušnim krajevima, gdje se uglavnom prakticira direktna sjetva. Tu poslije žetve nema obrade. Pošto je vrlo suho, korova i samoniklih žitarica je malo. Tu možete raditi sa sistemom kamera – umjesto da prskate cijelu površinu, glifosatom možete prskati konkretne biljke i tako smanjiti troškove.
Pored „Green on Green“ i „Green on Brown“ postoji još jedna razlika, a to su offline i online procedure. Do sada smo opisivali onlinen procedure, odnosno imate kamere na krilu i sistem odlučuje da li će prskati ili ne.
Kod offline procedure, informacije se povlače od prethodnog procesa skeniranja. Po pravilu letite iznad parcele dronom opremljenim kamerom visoke rezolucije i skenirate područje sa visine od oko 20 m. Trenutno se koristi algoritam za razlikovanje između korova i usjeva. Ovaj sistem radi mapu sa područjima koje treba prskati. Ove informacije se zatim učitavaju u terminal stroja i parcela se tretira. Ovo funkcionira na sličan način kao i aplikacije za gnojenje.
Već neko vrijeme izvodimo testove sa offline sistemima. U biti, i ovaj sistem funkcionira, ali ima nekoliko prepreka. Na primjer, kada želite prskati morate imati aktualne podatke. Nema svrhe letjeti dronom iznad parcele 14 dana prije samog prskanja, jer će se populacija korova u međuvremenu promijeniti. Druga prepreka je fizičke prirode. Kod ove procedure točke koje se tretiraju moraju biti veće da bi pogodile korov, jer se GPS tolerancije drona i prskalice sabiraju. Međutim, veće točke znače veću površinu za prskanje, a time se smanjuje potencijal za uštedu. Vrlo velike količine podataka predstavljaju dodatni izazov, generiraju se gigabajti po hektaru koji se šalju i server da se tamo opet preračunaju. Trenutne internet veze ovde često dostižu svoje granice. S druge strane, mape aplikacija se moraju poslati nazad na terminal rukovatelja. U odnosu od broja poligona (spotova), sa trenutnim ISOBUS terminalima su moguće samo mape aplikacije manje od 5 hektara.
Znači offline procedura je moguća tehnički ili tehnološki. U praksi je potrebno malo više vremena za optimizaciju procesa i prije svega su nam potrebna rješenja za velike količine podataka. Možda ćemo morati pronaći paralelni put do ISOBUS-a.
terraHORSCH: Koji je Vaš zaključak za kraj?
Theodor Leeb: Mislim da je logično da Spot Spraying bude slijedeći korak k Zelenom dogovoru, zaštiti životne sredine i održivosti. Logično je da od tretiranja površine preko prskanja u trake dođemo do preciznog Spot Sprayinga. Cilj je prskanje samo tamo gdje je to neophodno. U tom slučaju dobre rezultate može dati sistem zasnovan na kamerama bilo online ili offline.
Intenzivno radimo na optimizaciji ovih sistema i provodimo testove. Naš zadatak je da moguće sprovedemo u djelo, i da ovi postupci budu sigurni i laki za upotrebu u svakodnevnom radu. Tako Spot Spraying može postati temelj optimizacije klasične zaštite bilja. S druge strane, ograničava nas činjenica da na njivi ne postoje normirani, nepromijenljivi uvjeti rada.
Moram zaključiti da priroda ostaje priroda, a onda ne dozvoljava da se sapne u industrijski ili digitalni korset.