
Dans le domaine de la protection des cultures, les systèmes de reconnaissance assistés par caméra ont fait leur apparition sur le marché. Dans quelle mesure cette technologie est-elle cependant utilisée sur le terrain ? Depuis déjà quelques temps, HORSCH LEEB mène des essais sur ce procédé. Theo Leeb nous explique quels sont les défis et les opportunités que représente cette technologie.
Reconnaissance ultra-localisée des cultures - Quel avenir pour les systèmes assistés par caméra?

terraHORSCH: Quel est l’état de l’art en matière de technique de reconnaissance des cultures par caméra?
Theodor Leeb: Des systèmes de reconnaissance par caméra permettant une pulvérisation ultra-localisée des adventices ou «Spot Spraying » ont été présentés sur le stand de certaines start-up lors de l’Agritechnica 2019. Cette technologie a généré une attente grandissante chez les clients, les fabricants mais aussi auprès des dirigeants politiques. Au sein de HORSCH Leeb, nous menons ces dernières années des essais dans le cadre de projets de recherche et développement afin de déterminer la maturité technologique de ce procédé. Le Spot Spraying qui utilise un système de détection assisté par des capteurs optiques ou des caméras n’a en effet rien de fondamentalement nouveau. Ce procédé est déjà mis en œuvre depuis une vingtaine d’années dans les régions à faible niveau de pluviométrie, où le semis direct est très développé, comme l’Australie, la Russie ou le Kazakhstan – on parle alors de la technique « Green on Brown » ou « vert sur marron », à laquelle s’ajoute aussi le « Green in Green » ou « vert sur vert ». Le procédé existe donc déjà. L’enjeu est donc plutôt de déterminer quel sera le système le plus pertinent pour telle ou telle condition.
terraHORSCH: Que signifient „Green on Brown“ et „Green in Green“?
Theodor Leeb: On distingue deux procédés : le « Green on Brown » d’une part, le « Green in Green » de l’autre. On entend ici par « marron » le sol et par « vert » la végétation en général, qu’il s’agisse de la culture ou bien des adventices. Le procédé du « Green on Brown” ou «vert sur marron » existe déjà depuis longtemps sur le marché. Certains fabricants proposent notamment des solutions de pulvérisation de glyphosate avant le semis. Cette pratique est surtout développée dans les terres propices au semis direct. Dans le procédé « Green in Green » ou « vert sur vert », on dissocie la culture elle-même des adventices. Cela permet également de savoir quels types d’adventices sont présentes.
Pour répondre à votre question concernant notre état d’avancement en la matière : nous avons déjà réalisé quelques essais cette saison et l’année dernière.
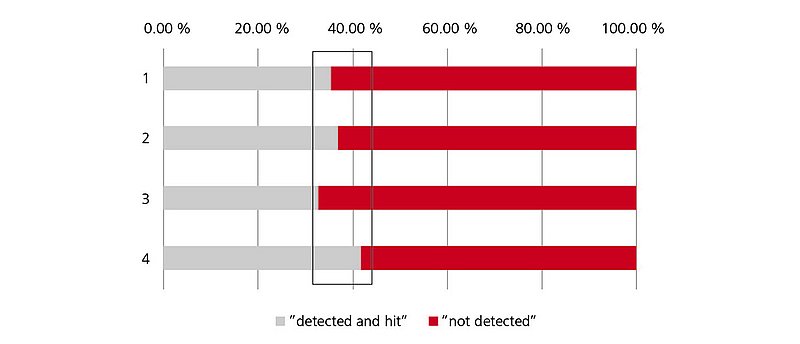
Dans le cadre du développement du procédé « vert sur vert », nous avons effectué des essais de pulvérisation sur des chardons dans des blés. Les chardons apparaissent généralement en nids et non de manière disséminée sur la totalité du champ. C’est donc un cas d’application particulièrement pertinent pour la pulvérisation localisée. Notre essai a pour objectif de déterminer la précision avec laquelle notre système reconnait les chardons et avec quel taux de réussite. De manière générale, nous pouvons affirmer que le système fonctionne. Les chardons sont détectés, mais seulement en partie. Nous avons atteint un taux de réussite de 40 à 60% environ. La question est de savoir si cette valeur est satisfaisante. A mon avis, ce résultat est encore insuffisant pour parler de maturité technologique et de déploiement en série. Tout agriculteur est également susceptible de se demander si les adventices subsistantes sont acceptables ou non. Cela dépend naturellement du type d’adventice mais cet aspect doit être encore clarifié.
terraHORSCH: Est-ce que les chardons n’ont pas été du tout reconnus ou bien le système n’a-t-il pas réagi suffisamment rapidement pour détecter les chardons ?
Theodor Leeb: Dans notre essai, nous avons distingué plusieurs cas de figure : « reconnu, mais non atteint » ou simplement « non reconnu », et donc logiquement « non atteint ». La calibration du système rentre aussi en compte. Sur une rampe de 36 mètres, le système est composé de douze caméras installées avec un intervalle de trois mètres et inclinées vers l’avant. Les buses sont supervisées, en fonction de leur emplacement, par le champ de la caméra correspondante. Le calibrage de la position de chaque caméra doit donc être réalisé avec la plus grande précision de sorte que la buse associée se déclenche exactement au bon moment.
Le principal problème réside en fait plutôt dans la non-détection des chardons par le système. La variabilité des conditions de luminosité constitue un véritable défi. Car il y a une réelle différence selon que le ciel est nuageux ou ensoleillé, que l’on travaille face ou dos au soleil, etc. Et les conditions météorologiques ont aussi du coup un impact sur la forme du chardon. En cas de fort ensoleillement par exemple, les feuilles se recourbent légèrement, ce qui diminue significativement le taux de reconnaissance. Nous avons dû constater que notre système nécessitait encore des optimisations.
terraHORSCH: Que devez-vous encore optimiser afin que le système « vert sur vert » soit opérationnel ?
Theodor Leeb: Il faut être conscient que ce procédé implique l’utilisation de l’AI (intelligence artificielle). Cela nécessite un nombre très élevé d’algorithmes d’apprentissage afin que le système soit capable de détecter les chardons de manière inconditionnelle. Il nous faut donc constituer une banque d’images et de données sur le chardon, de formes différentes, dans toutes les conditions de luminosité, à différents stades de développement mais aussi pour les différentes variétés. Cela représente des milliers d’images qui doivent être analysées manuellement et classifiées. Chaque pixel constituant l’image doit être associé. C’est une tâche très chronophage qui constitue en fait l‘enjeu véritable dans la réussite de ce procédé. Plus nous alimentons le système en images classifiées, plus nous augmentons la précision et la fiabilité de celui-ci.
Dans l’essai „vert sur vert“, les variations de couleurs, de formes ou d’intensité lumineuse impactent la fonction de reconnaissance des chardons par le système. Par ailleurs, le système n’a reconnu que les chardons qui avaient dépassé la hauteur de la culture principale. 
Dans l’essai „vert sur vert“, les variations de couleurs, de formes ou d’intensité lumineuse impactent la fonction de reconnaissance des chardons par le système. Par ailleurs, le système n’a reconnu que les chardons qui avaient dépassé la hauteur de la culture principale.
terraHORSCH: … Sachant que le chardon a une forme singulière et est donc facilement reconnaissable par rapport à d’autres types de plantes.
Theodor Leeb: C’est tout à fait juste. C’est une plante facilement identifiable à l’œil et par l’homme. On peut facilement faire la différence entre les plantes monocotylédones et dicotylédones. Mais si l’on veut différencier, par ex. le vulpin du blé, il s’agit d’un exercice bien plus complexe. On se heurte même aux limites de la faisabilité.
Nous sommes également confrontés à d’autres contraintes techniques. La taille du spot, c’est-à-dire la plus petite surface qui puisse être pulvérisée, a son importance. Si nous étions en mesure de garantir une surface effective de pulvérisation de 5x5cm par ex. de la moindre petite adventice, nous pourrions atteindre théoriquement le plus grand potentiel d’économie. Comme nous utilisons des pulvérisateurs en bandes équipés de buses espacées de 50 cm ou 25 cm, la largeur minimale de pulvérisation est limitée à 60 cm voire 35 cm selon la configuration de répartition des buses. Comme les buses ne peuvent être coupées instantanément, la surface de pulvérisation dans le sens du travail est d’environ 50 cm de long. Si les adventices sont espacées de moins de 50 cm, la buse ne se coupera pas. Le rapport surface minimum de pulvérisation / surface contaminée par les adventices est donc un facteur déterminant pour calculer le potentiel d’économie. La physique et notamment l’optique nous imposent également une limite supplémentaire. Prenons par exemple le cas de la betterave sucrière : la reconnaissance précoce des adventices, d’un centimètre ou moins, est particulièrement décisive. En théorie, le système est capable de détecter des plantes aussi petites dans la mesure où le passage est effectué à une vitesse très réduite et que le champ de la caméra balaye la totalité de la surface de la plante. En pratique, les vitesses de travail habituelles avoisinent cependant plutôt les 10 km/h. Les caméras sont positionnées de manière oblique afin d’en augmenter la réactivité. Dans le cas où une plus grosse motte de terre ou une culture plus haute occulte l’adventice ciblée, la caméra ne pourra alors pas la reconnaître. Le taux de réussite de 100% n’est donc pas atteignable. La question est donc de savoir quel est le taux de réussite acceptable. Est-ce que 90% suffit ? Nous ne sommes pas encore en mesure de l’affirmer à ce jour.

Comme le chardon n’infeste pas la totalité de la parcelle mais apparaît en nid, il se prête particulièrement bien aux essais de pulvérisation ultra-localisée avec la technique de Spot Spraying. Le test a permis de déterminer le taux de réussite atteint par le procédé et si celui-ci était capable de reconnaître le chardon. 
Comme le chardon n’infeste pas la totalité de la parcelle mais apparaît en nid, il se prête particulièrement bien aux essais de pulvérisation ultra-localisée avec la technique de Spot Spraying. Le test a permis de déterminer le taux de réussite atteint par le procédé et si celui-ci était capable de reconnaître le chardon.
terraHORSCH: Cela signifie que cette technologie est actuellement limitée par le nombre très élevé d’algorithmes d’apprentissages nécessaires et par la physique.
Theodor Leeb: Exactement, et à cela s’ajoute une problématique encore bien plus complexe. Pour les cultures en rang, on applique habituellement des herbicides de pré-levée. Ce traitement agit comme une protection temporaire du sol contre les adventices. Les adventices qui poussent dans les deux à trois semaines qui suivent sont traitées avec un herbicide foliaire. Si l’on renonce à l’herbicide de pré-levée, on doit théoriquement attendre que les adventices aient atteint une taille suffisante pour qu’elles soient détectables par la caméra. Imaginons que nous appliquions sur ces adventices un herbicide foliaire de manière ultra-localisée : l’herbicide foliaire ainsi pulvérisé aura l’inconvénient d’entraver la culture principale dans son développement. On n’aura pas d’autre choix que de traiter si les adventices poussent trop près des betteraves sucrières. La réapparition des adventices reste dans tous les cas un problème récurrent. Il faut donc se poser la question suivante : à quelle fréquence dois-je recourir à la pulvérisation ultra-localisée afin que mon champ de betteraves reste toujours propre ? Nous n’avons pas encore essayé de retirer le traitement herbicide de pré-levée. Et dans le cas de la betterave sucrière, je ne pense pas qu’il soit pertinent de renoncer à ce traitement. Selon moi, il faudrait plutôt envisager un procédé qui combinerait une application traditionnelle d’herbicide de pré-levée en première intention puis des applications ultra-localisées d’herbicides de post-levée à l’aide d’un système de reconnaissance par caméra. Il s’agit aussi de développer une approche raisonnée où l’on tolérerait un certain seuil de pression des adventices, c’est-à-dire d’admettre la présence de certaines adventices ou mauvaises herbes qui seraient déjà connues du système. Cette approche se défend dans la mesure où elle s’intègre dans une stratégie de rotation bien réfléchie et que les adventices ne présentent pas de problème pour la culture suivante ou sont faciles à traiter. C’est vraiment là que se trouve à mes yeux le plus gros potentiel d’économie. Cette approche nécessite néanmoins encore des développements car il ne s’agit pas seulement de reconnaitre les adventices mais également de les classifier.
terraHORSCH: Nous avons abordé le sujet des herbicides. N’y aurait-il pas d’autres applications où la pulvérisation ultra-localisée pourrait être intéressante ?
Theodor Leeb: En ce qui concerne la lutte contre les maladies notamment pour les céréales, on pourrait imaginer une application partiellement localisée de fongicides ou de stimulateurs de croissance.Ce type de traitements ne nécessite pas foncièrement de système d’application ultra-localisée comme évoqué précédemment, puisqu’on traite des surfaces beaucoup plus importantes. En revanche, cette application se prête particulièrement bien à notre solution de buses à impulsion PrecisionSpray, permettant une application variable tous les tronçons de 3 mètres. Par ailleurs, certaines techniques de reconnaissance des maladies par caméra sont en voie de développement. Mais il faut se demander si cette technologie n’arrivera finalement pas trop tard sur le marché. En la matière, l’avenir se trouve selon moi davantage dans le développement de la biomasse et des modèles de prévision météorologique.
terraHORSCH: Comment fonctionne le système „Green in Brown“ ou „vert sur marron“?
Theodor Leeb: Nous avons réalisé des essais conjoints avec un fabricant français. Le procédé est basé sur la différenciation des couleurs, c’est-à-dire que la caméra effectue une analyse d’image en différenciant les pixels verts des pixels marrons afin de déterminer s’il s’agit du sol ou d’une plante. Seules les surfaces vertes sont ensuite traitées. Nous avons eu de bons résultats, néanmoins cette technique reste limitée en Europe centrale comme le travail du sol y est relativement important et que les conditions sont particulièrement humides.
terraHORSCH: Pourriez-vous nous en dire davantage sur ce point?
Theodor Leeb : Dans les terres à rendement élevé, un déchaumage est généralement effectué après la récolte afin d'incorporer la paille. Après quelques jours ou semaines, les repousses de céréales et les mauvaises herbes lèvent, donc le champ est de nouveau plus ou moins vert. La pulvérisation ultra-localisée ne peut être pratiquée dans ce cas de figure car les plantes sont trop proches du sol. Il faudrait traiter la totalité de la surface et non pas partiellement. Dans les régions sèches propices au semis direct, les choses sont différentes. Il n’y pas de déchaumage après récolte. Comme il fait très sec, l’émergence d’adventices ou de repousses de céréale est assez limitée. Dans ce cas, le recours à la technique de pulvérisation ultra-localisée est particulièrement intéressant pour réaliser des économies puisqu’on peut appliquer de manière localisée du glyphosate par ex. sur les cultures ciblées à l’aide d’un système de reconnaissance par caméra.
Parallèlement aux systèmes „Green on Brown“ et „Green in Green“, il faut distinguer de manière plus globale les procédés « Offline » (hors-ligne), des procédés « Online » (en ligne). Les techniques que nous avons évoquées jusqu’ici reposent sur un procédé « Online », c’est-à-dire que les caméras sont fixées sur la rampe et assistent directement la pulvérisation ou non de la surface lors du passage du pulvérisateur.
Les procédés dits « Offline » sont basés sur des informations issues d’une numérisation effectuée a priori. En pratique, on recourt à un drone équipé d’une caméra haute définition afin de numériser la surface de la parcelle à une altitude de 20 m environ. Il est désormais possible de différencier les adventices de la culture sur une image haute résolution, à l’aide d’un algorithme. Ce procédé permet d’établir une carte d’application cartographiant les surfaces qui doivent être traitées. Ces informations sont ensuite transférées vers le terminal de la machine afin de traiter la parcelle. Cela fonctionne sur le même principe que les cartes d’application utilisées pour la fertilisation.
Nous réalisons déjà des essais en matière de procédés hors-ligne en partenariat avec une start-up. Ce système fonctionne en théorie mais nous rencontrons encore certaines difficultés pratiques. La première concerne la nécessité de disposer de données actualisées lorsque l’on souhaite traiter une parcelle. Cela ne sert à rien de numériser son champ quinze jours avant car les adventices se seront développées entre temps. L’autre difficulté est liée de nouveau à la physique. Comme cette technique consiste en deux phases distinctes, la précision des coordonnées GPS du drone doit être additionnée à la précision du pulvérisateur, ce qui résulte en une taille de spot plus grande. Si les spots sont plus grands, cela implique une surface pulvérisée plus importante et un potentiel d’économie moindre.
Enfin, la dernière difficulté concerne le volume très élevé de données généré par ce procédé. La numérisation d’un hectare de parcelle représente plusieurs gigas de données qui doivent ensuite être envoyées vers un serveur pour y être analysées. La qualité actuelle des connexions internet demeure encore trop médiocre. Sans compter que les cartes d’applications doivent également être transférées vers le terminal de l’agriculteur. Au regard des capacités actuelles des terminaux ISOBUS du marché, on peut générer des cartes d’application couvrant au maximum 5 ha selon le nombre de polygones (spots) identifiés.
Pour résumer : le procédé hors ligne est concevable sur le plan technique ou technologique. Il nécessite néanmoins encore des améliorations afin d’être déployé sur le terrain. Il nous faut notamment fluidifier les processus et trouver des solutions pour traiter la masse très élevée de données. Cela impliquera peut-être même d’envisager une alternative à ISOBUS.
terraHORSCH: Quelle conclusion pouvez-vous tirer de tout cela ?
Theodor Leeb: Je suis convaincu que la pulvérisation ultra-localisée ou Spot Spraying représente une suite logique en matière de pratique afin de répondre aux enjeux relatifs au pacte vert (Green Deal), à la protection de l’environnement et au développement durable. Cela signifie que la protection conventionnelle des cultures passera par la technologie de pulvérisation en bandes pour se tourner vers une application ultra-localisée. L’objectif ultime est toujours de traiter les surfaces qui le nécessitent. Le système de reconnaissance par caméra est un outil très pertinent pour le développement de ce type de procédés, qu’ils soient en ligne ou hors ligne.
Nous continuons à améliorer ces techniques grâce à des essais permanents afin de gagner en expérience. Notre objectif est de développer une technologie la plus avancée possible afin qu’elle soit utilisable sur le terrain au quotidien par les agriculteurs tout en garantissant un niveau constant de fiabilité et de simplicité d’utilisation. La technique de la pulvérisation ultra-localisée ou Spot Spraying constitue donc un levier supplémentaire pour optimiser la protection conventionnelle des cultures. Il faut cependant rester conscient des limites de ce procédé en termes de faisabilité car aucune condition, norme ou technologie ne peut être constante dans les champs.
Pour faire simple : la nature demeure intrinsèquement la nature. Elle ne se laissera donc pas dompter par la technique ou le numérique.