
Захист рослин за допомогою відеокамер? Така техніка вже відома, але наскільки вона практична? HORSCH LEEB тестує таку техніку впродовж тривалого часу. Тео Лееб розповідає, у чому полягають її основні виклики й шанси.
Система камер із розпізнаванням рослин — техніка майбутнього

terraHORSCH: Які технічні можливості існують сьогодні для того, аби машина розпізнавала рослини?
Теодор Лееб: На Agritechnica-2019 ми бачили, як молоді підприємці сміливо демонстрували зі Start-up-сцени свої рішення у сегменті точкового обприскування (Spot Spraying). Це зумовило певні очікування у клієнтів, виробників і політиків щодо появи у найближчому майбутньому серійних практичних рішень.Наше підприємство останніми роками доклало чимало зусиль, аби прояснити ситуацію і з’ясувати для себе, де наше місце у цьому сегменті. Spot Spraying з оптичними сенсорами або відеокамерами вже давно не є чимось революційним. Цей метод протягом останніх 20 років успішно застосовують у регіонах, де мала кількість опадів, і тому там застосовують прямий висів. Зокрема, це Австралія, Росія або Казахстан. Тут працює принцип «зелене на коричневому» («Green on Brown»), тобто йдеться про обробіток не в період вегетації. У період вегетації працюють за принципом «зелене на зеленому» («Green in Green»), що потребує значно ширшого діапазону винахідливості.
terraHORSCH: Що саме означає «Green on Brown» та «Green in Green»?
Теодор Лееб: У цій термінології коричневий та зелений кольори символізують, відповідно, ґрунт і рослини. Зелений колір — не лише культура, а й бур’яни. Принцип «зелене на коричневому» стосується досходового гербіцидного обробітку гліфосатами. Ця технологія існує вже давно, її широко застосовують у системах no-till. Метод «зелене на зеленому» означає розпізнавання, де культурна рослина, а де бур’ян. Подальше вдосконалення цього методу передбачає розпізнавання виду бур’янів.
Забігаючи наперед, скажу, що ми проводимо активні досліди в цьому сегменті вже протягом останніх двох років.
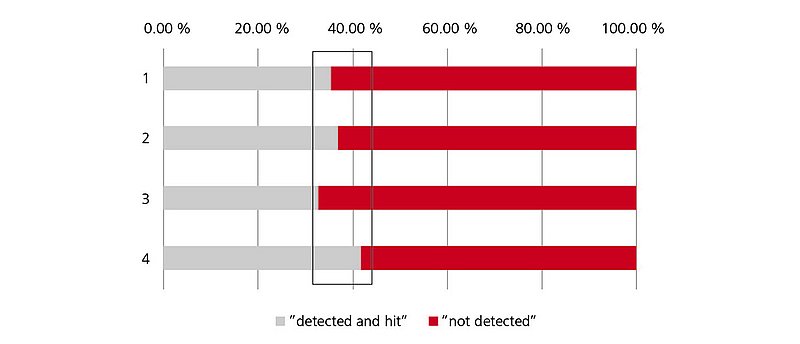
Зокрема, ми провели дослід за методом «Green in Green» щодо контролю осоту на посівах пшениці. Осот, як правило, проявляється не поодинокими рослинами а ділянками, що трапляються на полі не скрізь. Тобто, у цьому разі існувала необхідність саме точкового обробітку. Ми прагнули з’ясувати, наскільки точно система здатна розпізнавати осот, і яка ефективність його обробітку у відсотках. Наші камери розпізнавали осот, але не весь. Ефективність обробітку становила 40–60%. Звісно, постає запитання, чи цього достатньо. Я вважаю, що поки рано говорити про серійне застосування таких рішень. Інший аспект, що хвилює аграріїв, — резистентність бур’янів. Як із цим боротися?
terraHORSCH: Система не змогла розпізнати осот, чи недостатньо швидко реагувала, і через це ефективність обробок була незадовільна?
Теодор Лееб: Проводячидослід, ми розмежовували випадки «розпізнав, але не влучив» та «не розпізнав». Як з’ясувалося, важливу роль відіграє калібрування системи. На штанзі із шириною захвату 36 м встановлено 12 відеокамер, спрямованих за рухом агрегата. У полі зору кожної камери перебувають «приписані» їй форсунки. Позиція кожної камери дуже важлива, оскільки відхилення навіть на соту частку градуса позначається на швидкості вмикання конкретної форсунки.
Але насправді головна проблема полягає в тому, що система не розпізнавала осот. Найбільше значення мають погода й інтенсивність освітлення. Тобто ефективність залежить від того, сонячна чи похмура погода, чи рухається машина проти сонця тощо. Наприклад, у яскраві сонячні дні листя осоту дещо скручується, тож ступінь розпізнавання знижується. Отже, треба ще багато доопрацьовувати.
terraHORSCH: У який спосіб можна оптимізувати систему?
Теодор Лееб: Слід розуміти, що за цим стоїть штучний інтелект (ШІ). Для того щоб його «навчити», потрібна велика кількість даних: фото осоту за різної погоди, під різним кутом освітлення, на різних стадіях розвитку, різні його види тощо. Це тисячі фотографій, які необхідно відсортувати вручну й «підсунути» машині. Зрозуміло, що для цього потрібно багато часу, і хтось має виконати цю роботу.
У досліді за принципом «зелене на зеленому» система гірше розпізнавала осот, якщо колір, форма або інтенсивність освітлення істотно варіювали. Окрім того, розпізнавалися лише рослини, вищі за посіви 
У досліді за принципом «зелене на зеленому» система гірше розпізнавала осот, якщо колір, форма або інтенсивність освітлення істотно варіювали. Окрім того, розпізнавалися лише рослини, вищі за посіви
terraHORSCH: Порівняно з деякими іншими видами бур’янів осот ще доволі легко відрізнити від культури.
Теодор Лееб: Це правда. Але лише для людського ока. Ми дійсно легко відрізняємо дводольну рослину від однодольної (зокрема злакових). А от відрізнити, наприклад, китник від пшениці набагато важче — для людини майже неможливо.
Ще одна технічна проблема — пляма обробітку, тобто мінімально можлива площа обприскування. Теоретично в цьому полягає великий потенціал заощадження ЗЗР, якщо, наприклад, під площею кожної окремої плями матимемо на увазі площу 5 × 5 см. Та оскільки на практиці ми застосовуємо класичний обприскувач із відстанню між форсунками 25 чи 50 см, то, відповідно, мінімальний діаметр плями обробітку становитиме 35 або 60 см. Форсунки не здатні вмикатися/вимикатися миттєво, тому коло обробітку буде видовжене за рухом обприскувача приблизно на 50 см. Якщо бур’ян росте на меншій відстані один від одного ніж 50 см, форсунки не вимикатимуться взагалі. Тобто рівень заощадження ЗЗР безпосередньо залежатиме від співвідношення розміру плями контакту і ступеня забур’яненості. Інше обмеження становить фізика або ж оптика. Візьмемо, до прикладу, обробіток буряків: дуже важливо провести обробіток якомога раніше, коли бур’яни виросли тільки на 1 см або й менше. Теоретично відеокамери здатні розпізнати такі малі рослини, якщо обприскувач рухатиметься повільно, а огляд буде максимально широкий. Але на практиці обприскувач рухається зі швидкістю 10 км/год і більше. Щоб збільшити час реагування системи, кут огляду камер потрібно встановити заздалегідь. Якщо бур’ян закриватиме грудка землі чи якась інша рослина, камера не зможе його розпізнати. Тому 100%-вої ефективності досягти неможливо. Проблема лише в тому, який відсоток буде прийнятний. Чи достатньо 90%? Відповіді на це запитання ми поки що не маємо.

Оскільки осот росте не на всьому полі, а на окремих ділянках, раціонально застосовувати систему точкового обприскування (Spot Spraying). У закладеному досліді вивчали, чи розпізнають камери осот, і яка ефективність його обробітку 
Оскільки осот росте не на всьому полі, а на окремих ділянках, раціонально застосовувати систему точкового обприскування (Spot Spraying). У закладеному досліді вивчали, чи розпізнають камери осот, і яка ефективність його обробітку
terraHORSCH: Виходить, що розвиток цієї теми наразі лімітований кількістю даних і фізикою.
Теодор Лееб: Так, але є і третій аспект. Під час вирощування багатьох просапних культур одразу після сівби вносять ґрунтові гербіциди. Це допомагає певною мірою захистити рослини на перших стадіях розвитку. Наступні бур’яни, що проростають вже за два-три тижні, обробляють листковими засобами. Якщо ж відмовитися від ґрунтових гербіцидів, доведеться чекати, доки бур’яни виростуть і камера зможе їх розпізнати. Припустимо, що ми так і зробили — працюємо гербіцидом за системою Spot Spraying по листку. Проблема полягає в тому, що культурні рослини внаслідок обробок також зазнають стресу. Не можна уникнути потрапляння розчину на культуру, зокрема, коли бур’яни ростуть дуже близько. До того ж не всі бур’яни проростають одночасно. Тому виникає запитання: як часто проводити обробіток, аби поле з буряками було чистим? Ми ще не пробували відмовитися від ґрунтових гербіцидів. На мій погляд, на буряках це було б нераціонально. Доцільнішою була б комбінація гербіцидного обробітку ґрунту і листкові обприскування Spot-Spraying. Також я вважаю, що припустимий певний поріг забур’яненості, тобто можна не зважати на деякі бур’яни, що їх розпізнає камера. Адже наступного сезону з ними легко можна буде впоратися, правильно підібравши сівозміну. Я впевнений, що тут прихований великий економічний потенціал. Але техніку ще необхідно доопрацювати так, щоб вона могла не лише розпізнавати власне бур’ян, а й визначати його вид.
terraHORSCH: Поки що ми говорили про гербіцидні обробки. Де ще можна було б застосовувати Spot-Spraying?
Теодор Лееб: На мою думку,Spot-Spraying має потенціал застосування для фунгіцидних обробок зернових або внесення регуляторів росту. Але для цього не потрібна настільки точна система Spot-Spraying, оскільки доведеться обробляти більші ділянки. Такі обробки ми проводимо за допомогою системи PrecisionSpray із форсунками, що пульсують, яка здатна варіювати витрати на секціях штанги (кожна з яких завширшки 3 м). Вже є рішення, завдяки яким за допомогою камери можна розпізнати хвороби. Проблема лише в тому, чи не запізно тоді вже для обробок. Я вважаю, що рішення з моделювання погоди й аналізу біомаси набагато перспективніші.
terraHORSCH: Як працює принцип «Green on Brown»?
Теодор Лееб: Разом з іншим виробником із Франції ми заклали кілька дослідів. Метод базується винятково на ідентифікації кольорів поверхні. Тобто камера аналізує цифрове зображення малюнка і визначає, які це пікселі — зелені чи коричневі, рослина чи ґрунт. Тоді зелені ділянки обробляються, коричневі — ні. Ця система функціонує дуже добре. Але в Центральній Європі її застосовують дуже мало, оскільки тут поширений обробіток ґрунту й достатньо вологі умови.
terraHORSCH: Чи могли б Ви пояснити це детальніше?
Теодор Лееб: У регіонах із високою врожайністю після збирання врожаю, як правило, проводять лущення стерні — заробляють пожнивні рештки, провокують сходи падалиці тощо. За деякий час на полі з’являються сходи падалиці та бур’янів. Здебільшого, це суцільний зелений покрив. У такому разі точкове обприскування не має жодного сенсу, адже рослини розташовані щільно одна до одної. Тобто потрібен суцільний обробіток площі, а не точковий. У посушливих регіонах, де зазвичай переважає мінімальний або нульовий обробіток ґрунту, ситуація зовсім інша. Після збирання врожаю тут взагалі не обробляють ґрунт. Через брак вологи бур’янів та падалиці сходить мало. За такої технології має сенс цілеспрямовано обробляти окремі рослини за допомогою камер замість суцільного обробітку гліфосатами. Це заощадить і час, і кошти.
Окрім вже згаданих систем «Green on Brown» та «Green in Green», розрізняють ще онлайн- та офлайн-процеси. Усе, про що ми тут говорили, стосується онлайн-процесів, коли камера і система працюють у режимі реального часу й просто під час руху «ухвалюють рішення» — чи обробляти відповідну ділянку.
Натомість офлайн-процеси потребують втручання людини. Як правило, поля спочатку облітають дроном. За допомогою камери з високою роздільною здатністю він сканує поле з висоти приблизно 20 м. Після цього спеціальні алгоритми аналізують зображення посівів на забур’яненість. На підставі отриманої інформації складають карти аплікацій із позначенням ділянок, які необхідно обробити. Потім ці карти завантажують у термінал обприскувача як робоче завдання. Це мало відрізняється від диференційного внесення добрив із застосуванням карт полів.
Спільно з одним стартапом упродовж певного часу ми проводимо деякі досліди щодо офлайн-системи. Загалом система працює добре, за винятком кількох моментів. Наприклад, перш ніж проводити обприскування, потрібно мати актуальні дані. Адже немає сенсу робити знімки дроном за два тижні наперед, якщо за цей проміжок картина поля може істотно змінитися. Інший бар’єр має фізичну природу. Розділення окремих етапів процесу потребує збільшення ділянок обприскування, щоб гарантувати обробіток бур’янів. Адже відхилення точності GPS-координат дрона й обприскувача додаються і в підсумку зростають. Відповідно, більші ареали обробітку, своєю чергою, підвищують загальні витрати і знижують економічний ефект.
Додатковий виклик — великі масиви даних. Це гігабайти на гектар, що їх необхідно надіслати на сервер для подальшої обробки. Часто-густо це неможливо зробити через обмеження Інтернету. З іншого боку, вже готові карти-завдання треба передавати назад на термінал машини. Залежно від кількості полігонів (ділянок обприскування) сучасні термінали ISOBUS можуть одночасно використовувати карти-завдання для полів площею до 5 га.
Це означає, що технічно або технологічно офлайн-процес цілком можливий. Але щоб він був практичним, знадобиться додатковий час для оптимізації процесів. Зокрема, потрібні рішення для приймання-передачі великого обсягу даних. Можливо, для цього знадобиться розробити паралельну до ISOBUS шину інтерфейсу.
terraHORSCH: Тож який із цього всього висновок?
Теодор Лееб: На мою думку, Spot Spraying — це наступний логічний крок, що дасть змогу задовольнити майбутні вимоги програм Європейського зеленого курсу, захисту довкілля і сталого розвитку. Ми послідовно переходимо від суцільного обробітку до стрічкового обприскування, а тепер і точкового застосування ЗЗР за допомогою Spot Spraying. Маємо на меті мінімальний обробіток, тобто лише там, де він насправді необхідний. Найпридатнішим для цього інструментом є техніка, оснащена камерами. Причому незалежно від системи застосування — онлайн чи офлайн.
Ми інтенсивно працюємо над оптимізацією таких систем і закладаємо нові досліди, щоб набути досвіду. Наше завдання — знайти прості, ефективні та надійні технічні й технологічні рішення, які фермери легко зможуть втілити у життя. Отже, Spot Spraying може стати наступним кроком на шляху оптимізації системи захисту рослин. Але тут я одразу бачу лімітувальні чинники, оскільки на полі ніколи не буде внормованих і сталих умов.
Щоб підбити підсумок: природа завжди залишиться природою. Тут завжди буде масив змінних, важко передбачуваних чинників, щодо яких легко прорахуватися. І навряд чи природа дозволить керувати собою, хоч як ми намагатимемося зашнурувати її у зручний для нас технічний або цифровий корсет.